
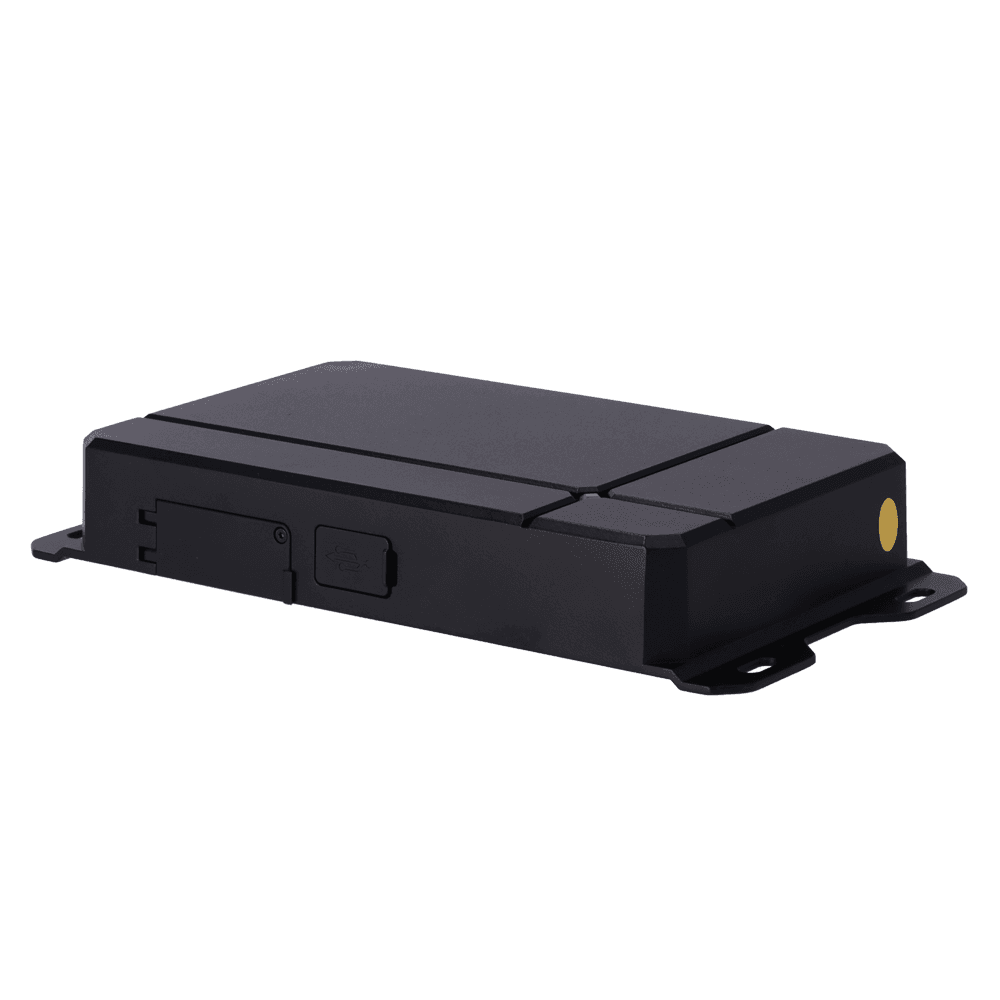
ST-AVM-KIT
Especificaciones
| Dimensiones | 214 x 112 x 33 mm (L x W x H) |
| Temperatura de Trabajo | -30°C a +70°C |
| Temperatura de Almacenamiento | -40°C a +85°C |
| Humedad Operativa | 15% - 95% RH |
| Entradas de Video | 4 canales AHD |
| Resolución de Video | 4 x 1080P a 15fps |
| Codificación | H.264 / H.265 |
| Salida de Video | CVBS / AHD |
| Salida de Audio | 1 canal |
| Voltaje de Entrada DC | 9 - 36V |
| Corriente de Entrada | ≤3A |
| Corriente Estática | ≤2mA |
| Reloj RTC | Error de 24H menor a ± 2s |
| Memoria Micro SD | 2 ranuras (Soporte individual de hasta 256GB) |
| Wi-Fi | Soporte para 2.4G |
| Posicionamiento | GPS (Soporte para G-MOUSE) |
| Interfaces | USB 2.0 (1), CAN (1), RS232 (3), RS485 (1), Pulso de velocidad (1) |
| IA Integrada | Algoritmo AVM, detección de salida de carril, detección de vehículo trasero |
Precios y pedidos restringidos
Para consultar tarifas personalizadas y hacer pedidos es necesario disponer de una cuenta comercial autorizada en Dolibarr. Por favor, espere a que su solicitud sea revisada y aprobada. Una vez aprobada, podrá iniciar sesión y acceder a los precios y funcionalidades de compra.
Productos relacionados
ST-CARPET-AVM
Tapete de calibración - Para calibrar AVM - Compatible con sistemas AVM

ST-M12A-AVM-18
Cable extensor para sistema 360º - Longitud 18 metros - Utilizado para vehiculos de gran longitud

ST-M12A-AVM-15
Cable extensor para sistema 360º - Longitud 15 metros - Utilizado para vehiculos de gran longitud

ST-M12A-AVM-11
Cable extensor para sistema 360º - Longitud 11 metros - Utilizado para vehiculos de gran longitud
Descripción del Producto
El sistema ST-AVM es una solución de vanguardia para la seguridad vehicular que utiliza tecnología de procesamiento de imágenes de última generación para ofrecer una visión panorámica de 360 grados alrededor del vehículo. Al integrar cuatro cámaras de alta definición, el dispositivo corrige la distorsión y une las imágenes en tiempo real, proporcionando al conductor una percepción total del entorno y eliminando los puntos ciegos. Además de la visualización, el sistema incorpora capacidades de Inteligencia Artificial para detectar riesgos críticos como peatones, salidas de carril no deseadas o vehículos acercándose rápidamente, convirtiéndose en un copiloto proactivo que minimiza accidentes y optimiza maniobras complejas.
- Visión Panorámica 360°: Unión de imágenes en tiempo real para eliminar ángulos muertos y proporcionar una visión completa del vehículo.
- Funciones de IA Avanzada: Detección de peatones, advertencia de salida de carril (LDW) y detección de aproximación de vehículos traseros.
- Procesamiento de Video de Alta Calidad: Entrada para 4 cámaras AHD con resolución de 1080P a 15fps.
- Almacenamiento Local: Soporte para grabación dual en tarjetas Micro SD (hasta 256GB por tarjeta).
- Conectividad Integral: Interfaz completa para telemetría incluyendo CAN, RS232, RS485 y GPS.